I have read your DM, but I will continue the conversation here.
Unfortunately, I don’t have all the ABB documentation available at the moment, so some information below may be more out-of-date than expected.
It seems that there is a problem with one of the run chains. These are influenced by different contacts and parts of the robot controller and will eventually decide if the robot may move. This makes finding the cause of the problem difficult.
The easiest thing to try is to check all cables and plugs normally accessible on the controller. Always do this with the robot powered down! Make sure they are all connected properly.
After that check the emergency stops. Make sure that they are all released and cycle them all by pressing them in and releasing them.
Another thing you can check are the run chain contacts. These contacts are located on connector X1 pin 5 (Run CH1 top) and X2 pin 5 (Run CH2 top). X1:5 expects 24VDC and X2:5 expects 0VDC. The connectors are explained here: ABB Emergency Stop conflict (error 20223) - #2 by 4lloyd. There should be a jumper cable between X1:4 and X1:5, and between X2:4 and X2:5 from the factory as seen in the picture below.
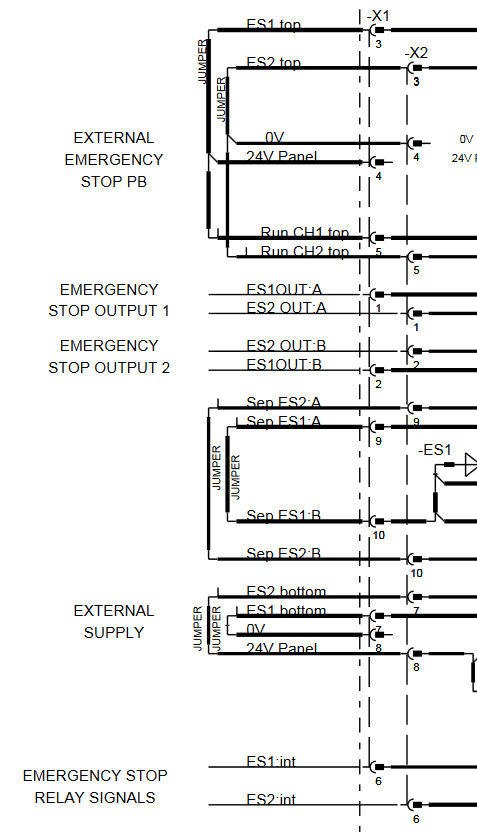
It may be that the jumper is removed and that the contacts are connected to something else. Can you tell me if the jumper cable is in place or that it’s connected to something else?
If the above things won’t solve the problem, then I need more information. Do you have a list of all error messages the robot is showing?